Bau von Roboter-Trainingsstationen
- Projektziele:
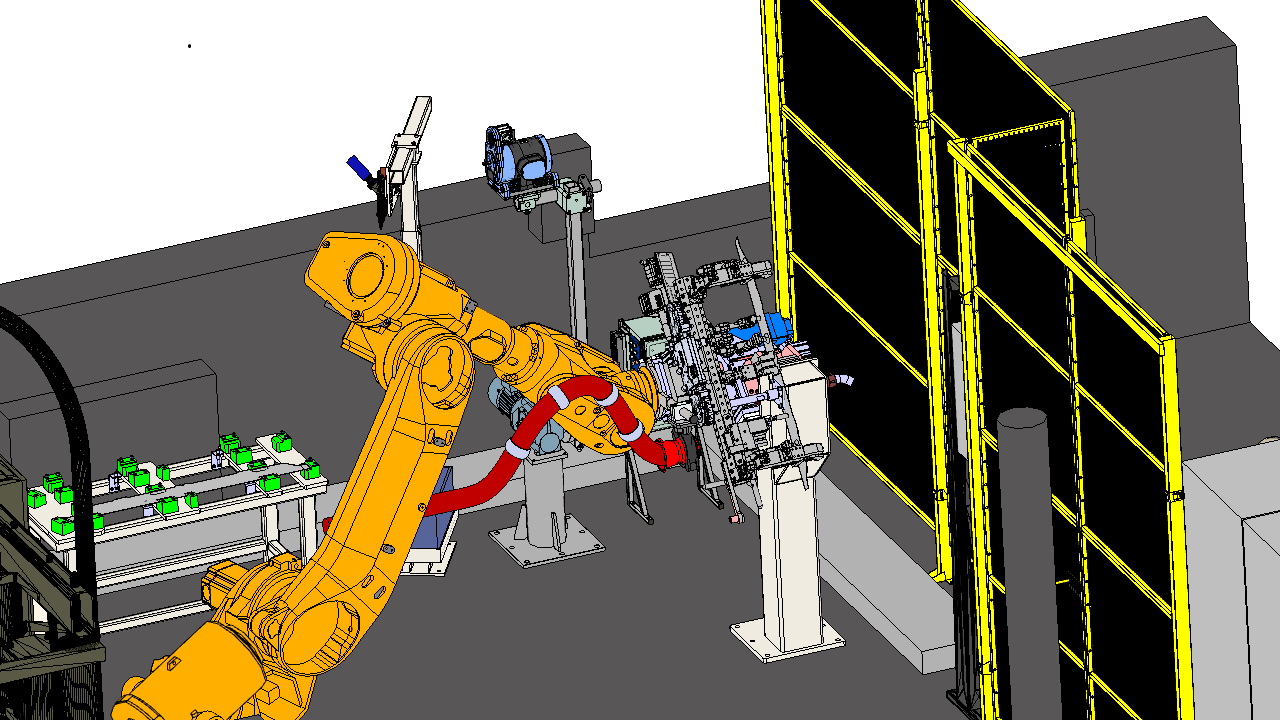
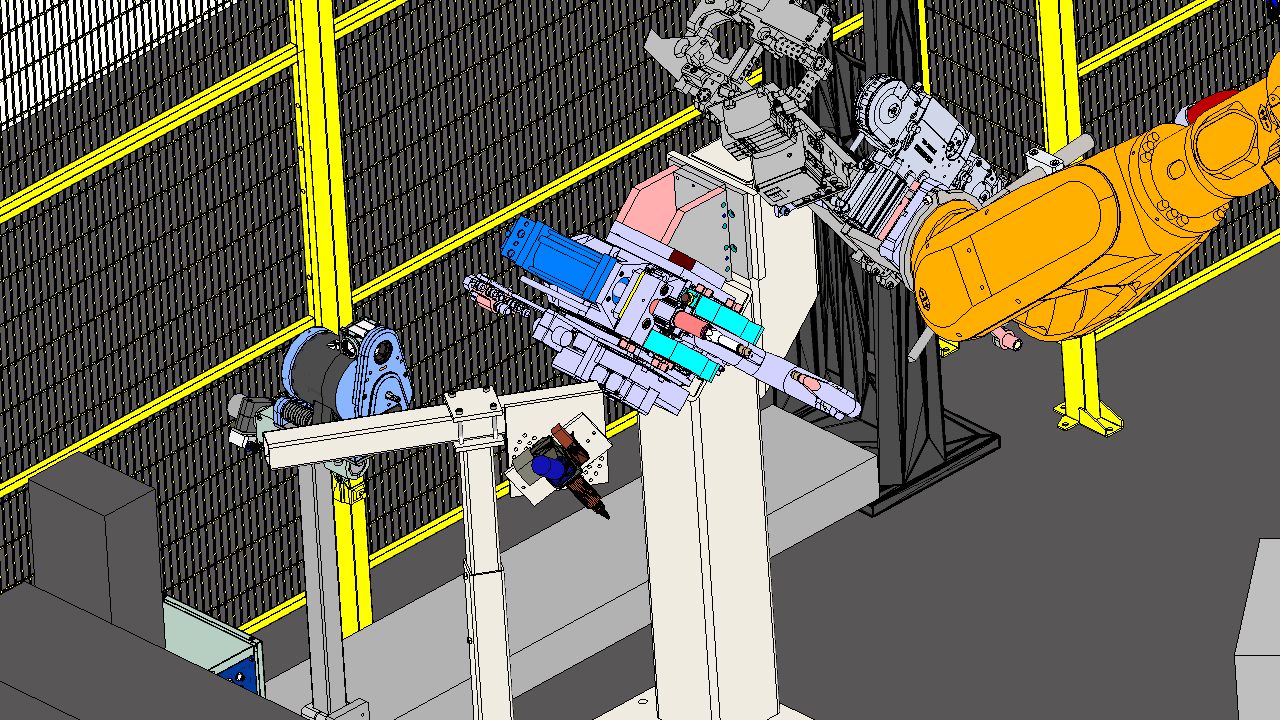
- Bau einer robotergestützte Schulungsstation,
- Einführung von Punktschweiß- und Klebeanwendungen,
- Migration von Steuerungen für Klebe- und Punktschweißanwendung von der Interbus-Schnittstelle zu Profinet.
- Projektvoraussetzungen:
- Vorbereitung der Konstruktion im Umfeld von Autodesk Inventor,
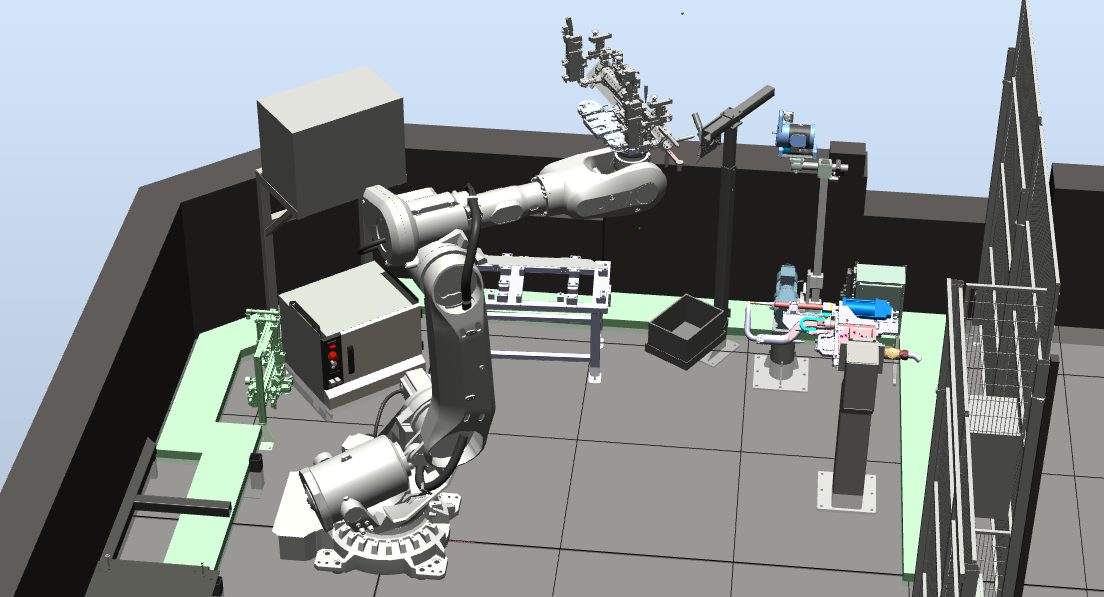
- Vorbereitung von Simulationen in der Umfeld von RobotStudio,
- Integration des ABB-Roboters mit SPS-Steuerung Siemens S7-1500,
- Verwendung der Industrieprotokolle Profinet und ProfiSafe,
- Anwendung des technologische Pakets ABB SafeMove,
- Verwendung:
- der Klebersteuerung der Firma Atlas Copco,
- der Steuerung der pneumatische Stumpfschweißmaschine der Firma SMC,
- der Punktschweißsteuerung der Firma Harms & Wende.